ESCAPING FROM PREDATORS An Integrative View of Escape Decisions (2015)
Part II Escape and refuge use: theory and findings for major taxonomic groups
IIc Escape trajectories and strategies during pursuit
8 Prey behaviors during fleeing: escape trajectories, signaling, and sensory defenses
Paolo Domenici and Graeme D. Ruxton
8.1 Introduction
After a prey individual has made the decision to flee from an approaching predator, a range of important behavioral options remain open to it, which can strongly influence the likelihood of flight being successful. We will explore some of these and consider signaling to the chasing predator (and to others) during flight and other ways prey may exploit the predator’s sensory systems. The most obvious way in which prey behavior during flight can influence escape ability is through control of the trajectory of its escape path. We will therefore focus the bulk of the chapter on this issue, not only because it is important, but also because there are many factors that may influence escape trajectory. However, flight logically begins with the initial directional decision. At first sight it seems obvious that prey should turn and flee away from the oncoming predator, but even this is not as simple as it first seems. To discuss this decision most effectively, we first introduce the reader to the concept of directionality in the early phase of an escape response (i.e., the first detectable reaction to a threat).
We focus only on certain aspects of behavior during predation attempts in some depth rather than covering all aspects briefly. We have not necessarily chosen the behaviors that might have the strongest influence on the outcome of flight. Rather we have chosen topics where we feel we can offer a fresh perspective on how extensive research in the field could further develop. We will begin by noting a number of topics that we do not explore in detail in this chapter.
An important aspect of fleeing behavior is the decision to stop (or at least pause) fleeing. This may occur if the prey perceives that the predator has given up the chase. The factors influencing the decision of when to stop fleeing have been understudied for practical reasons. It is difficult for experimenters to keep track of a fleeing animal, and so we have much more data on flight initiation than flight termination. This imbalance is likely to be corrected in the near future thanks to technological breakthroughs that allow the mounting of telemetric equipment on free-living animals.
One might assume that prey should flee at the highest possible speed, but this might not be the case. Slower speeds during flight may generate compensatory benefits of increased ability to monitor the chasing predator, and/or increased ability to sustain flight; it may also be related to a lower perceived risk of predation (Domenici 2010). The role of locomotor performance on the escape ability of the prey is the subject of Chapter 11 of this book, but we will briefly discuss the relative importance of speed and maneuverability, and the possibility that prey speed may be a cue that could be used by predators to assess prey palatability. Obtaining accurate speed measurements in the field from animals fleeing on trajectories that are often unpredictable and complex has been challenging; and again we expect that innovations in on-animal telemetry, GPS tracking, and accelerometry will revolutionize our understanding of this issue in the near future (Wilson et al. 2013).
We have not attempted to link the behavior of fleeing to life history and physiology. It is likely that flight decisions will be affected by long-term factors (e.g., ontogeny), medium-term factors (e.g., whether the animal is carrying young or not, the health status of the individual) and short-term factors (e.g., how recently the individual has previously fled, the local topography, the animal’s familiarity with the local topography). We will mention these topics briefly.
Finally, we have not sought to be encyclopedic in our taxonomic coverage. Rather we focus on small invertebrates, where experimental control and replication are more practical and ethical, and lower vertebrates, which have been studied extensively. Hence this chapter does not attempt to discuss taxonomic distributions of different behaviors; data to attempt this usefully are not yet available.
8.2 Directionality of initial escape responses
8.2.1 The meaning of directionality
When startled, animals tend to change their direction, most often in a way that takes them further away from the threat. The proportion of replicates in which a prey rotates or bends (for flexible animals) its body in a direction away from the threatening stimulus during the initial phase of an escape response is called directionality (Blaxter & Batty 1987; Comer & Dowd 1987; Domenici & Blake 1993a; Domenici et al. 2011a).
Thus, away and toward responses correspond to escapes accomplished via an initial turn directed away from and toward the stimulus, respectively. It is important to note that toward and away responses do not necessarily imply that the final heading of the prey will be toward or away from the threat, respectively. If the escape turn in a toward response is relatively small (e.g., 10°), the prey may continue to move along a path that is in a semicircle away from the threat (Figure 8.1).
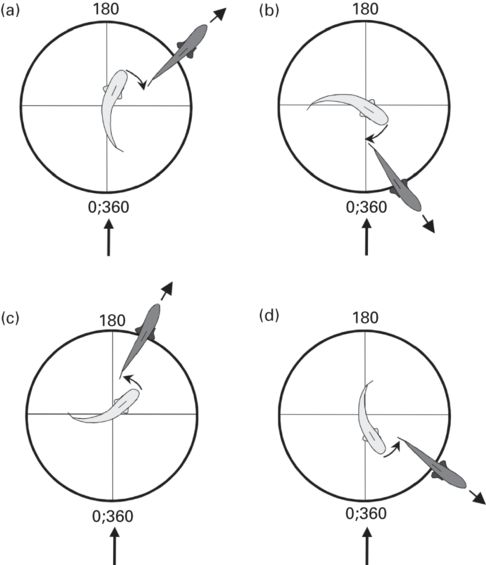
Figure 8.1
A small turn toward the threat (represented by the arrow at 0°) may result in a final heading (dark colored fish) in the semicircle away (A) or toward the stimulus (B), depending on the prey’s initial orientation (light colored fish). Similarly, a small turn away from the threat may result in a final heading in the semicircle away (C) or toward (D) the threat.
Independent of the final heading, scoring escapes in terms of initial responses away or toward provides us with a tool to investigate some of the underlying complexity of escape responses. Unpredictability has been suggested as an essential element of escape responses (Humphries & Driver 1970; Godin 1997; Edut & Eilam 2004; Comer 2009). In terms of directionality, for most predator approach trajectories, a random and therefore fully unpredictable pattern of escape would yield an equal proportion of away and toward responses. Alternatively, away responses may be advantageous because they allow prey to increase their distance from the threat. Most previous work (reviewed in Domenici et al. 2011a) shows directionality that is not completely random (i.e., 50% away and 50% toward), nor is it fully determined by the position of the threat (i.e., 100% away). Away responses tend to be more common than toward responses, and they constitute about 50 to 90% of the total escapes. From a sensory perspective, this is because the sensory system ipsilateral to the threat causes a rotation in a direction opposite to the stimulation (Domenici et al. 2011a). In fish, the Mauthner cells (i.e., the giant neurons that control escape responses) ipsilateral to the threatening stimulus are activated and control the contraction of the contralateral muscle, resulting in an away response in most cases (Eaton et al. 1981).
Although the presence of a small proportion of toward responses may be explained as a behavioral survival strategy, it may also be related to constraints affecting sensory performance, and these explanations need not be mutually exclusive. While away responses allow prey to move farther away from the threat, a small context-dependent proportion of toward responses may introduce a significant element of unpredictability. As we shall see, directionality is highly context dependent and is affected by a number of factors. Understanding how directionality is affected by environmental factors as well as by trade-offs with other characteristics of the escape response is fundamental to gaining some insights into the mechanisms driving directionality.
8.2.2 Individual characteristics and environmental factors affecting directionality
Accuracy is known to trade-off with the speed of a given behavioral response (Chittka et al. 2009). This general principle applies to work carried out on escape response, which shows that away responses have longer latencies than toward responses (in fish: Domenici & Batty 1997; Turesson et al. 2009). This suggests a potential trade-off between a short neural processing time (i.e., short latencies) and accuracy in directing the response away from the threat.
The orientation of the stimulus relative to the prey has an effect on directionality. In fish, when the threat comes from a direction that is approximately perpendicular to the prey’s body axis, escapes are most often away responses. On the other hand, when the stimulation is approximately in line with the prey’s body axis (i.e., within 30° from head-on or tail-on), escapes are equally likely to be away or toward responses (Domenici & Blake 1993a). From a sensory perspective, this is likely due to a decrease in left-right discrimination for mechanical stimuli that are aligned with the longitudinal axis of the fish (Domenici & Blake 1993a). However, according to a non-mutually exclusive functional explanation, when the prey is in line with the threat, executing a toward or an away response may matter very little in terms of distance gained from the predator and a similar proportion of away and toward responses may add unpredictability (Domenici 2010).
In many animal species, individuals may show task-specific lateral biases (Vallortigara & Rogers 2005). Lateralization has also been observed in escape responses, and it has been attributed to functional asymmetries in the brain (Cantalupo et al. 1995) or in the body/limbs (Heuts 1999, Krylov et al. 2008). Specialization for turning left or right may offset the disadvantages of turning toward the threat, and this may contribute to explaining why directionality is less than 100% in most species.
A predatory attack does not always trigger all sensory systems simultaneously, and different sensory channels do not necessarily yield similar levels of directionality. In a fish (herring larvae Clupea harengus), visual stimuli are associated with the highest directionality, compared with tactile and auditory stimuli (Blaxter & Batty 1985; Yin & Blaxter 1987; Batty 1989). Furthermore, directionality may increase across ontogenetic stages as a result of the development of sensory organs (Blaxter & Batty 1985).
Immediately prior to being startled, prey can be relatively idle or actively moving, and this can have an effect on directionality. For example, fish in the gliding phase of some swimming patterns show a higher proportion of away responses than actively swimming fish (Blaxter & Batty 1987). The physical environment can also affect directionality. Acute exposure to low temperature, low oxygen levels, and high CO2 were found to decrease directionality in fish (Preuss & Faber 2003; Domenici et al. 2007; Allan et al. 2014). These acute environmental changes are likely to have a direct effect on the functioning of the sensorimotor system, suggesting that directionality can be constrained by sensory performance.
Any object or organism positioned near the prey can also affect the proportion of away responses. Fish show an increased proportion of toward response when the path directed away from the threat is obstructed by a wall (Eaton & Emberley 1991). Anurans not only avoid escaping toward a barrier, but they also avoid escaping directly away from the threat if this means moving in the direction in which a barrier had been previously positioned and then removed (Ingle & Hoff 1990).
The presence of conspecifics can affect directionality in fish. Herring startled while solitary show lower directionality (around 65%) than those in a school (around 90%; Domenici & Batty 1997). This response may reflect a need for schooling fish to stick together, and therefore to show a uniform away response, as opposed to solitary fish that might increase the unpredictability of their response by turning toward the threat. Another proximate explanation may be that escape latencies are longer in schooling than solitary fish, which may allow them more time for sensory processing and therefore for directional accuracy, which agrees with the speed-accuracy trade-off.
8.2.3 Should responses with a turn toward a predator be considered mistakes?
Work described above suggests that the directionality of escape responses is highly flexible. Early work on escape responses in fish and insects considered toward responses as potentially “incorrect,” “wrong,” or “apparent tactical errors” (e.g., Eaton & Emberley 1991; Tauber & Camhi 1995; King & Comer 1996). To assess the functional significance of toward responses, we need to assess the effect of directionality on escape success. This has rarely been done, and therefore a possible way to assess the importance of directionality is through its effect on the final escape trajectory, which is known to be a major determinant of escape success (Walker et al. 2005).
Can prey whose initial escape is a turn toward the predator quickly steer to produce a trajectory directed away from the threat? In schooling herring, such steering is possible, because initial escaping with away and toward responses produce similar final escape trajectories at around 150° away from the threat (Domenici & Batty 1997). In contrast, in solitary herring the escape trajectories of toward and away responses differ. Schooling herring surrounded by neighbors that, in most cases, are swimming away from the threat, may conform by swimming in the same direction. The need to remain in contact with the group may be stronger than the need for generating unpredictability in the response (Domenici & Batty 1997).
In cockroaches (Periplaneta americana), initial toward responses tend to show very small turn angles (<30°) and the final escape trajectories largely overlap with those of away responses. When making a toward response, cockroaches may therefore be minimizing the time needed for the turn, which allows them to quickly reach one of the preferred escape trajectories, in turn allowing them to produce an effective antipredator response (Domenici et al. 2009). Frogs (Rana pipiens) show a similar pattern in escape behavior with toward responses producing small turn angles and escape trajectories that overlap with those of away responses (Domenici et al. 2011b).
In addition to representing a mechanism that minimizes the time needed for reaching specific trajectories and for generating unpredictability, toward responses may, in some predator-prey interactions, show a higher probability of success in avoiding capture. Predator attacks may in some cases reflect relatively complex strategies, so that escaping in what may appear the most sensible direction (away from the threat) may not pay off. A good example is that of tentacle snakes (Erpeton tentaculatum) feeding on fish. Tentacle snakes use their body to produce a pressure wave directed toward one side of the fish’s body, which triggers an away response in their prey in 80% of the trials (Catania 2009). In encounters with common predators, away responses would most likely direct the fish away from danger. However, tentacle snakes position their mouths where the fish predictably ends up when producing a response away from the snake’s body wave. As a result, fish escaping with an away response end up moving toward the snake’s open mouth (Figure 8.2). Tentacle snakes are rare predators of fish and this is most likely why they can turn the typically high proportion of away responses in fish to their advantage. From the prey’s perspective, a small proportion of toward responses may be adaptive in preventing capture by rare predators. It would be interesting to investigate if the occurrence of toward responses varies depending on the abundance of such rare predators.
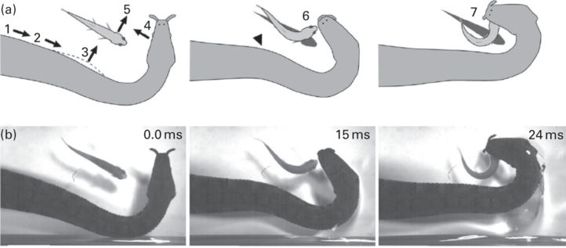
Figure 8.2
Fish escape response to tentacled snakes. The pressure wave created by the snake’s body is shown in the left panels by the arrow marked as “3.” The prey reacts with an “away response” (i.e., the body makes a C-shape away from the snake’s body; central panels), and eventually ends up in the snake’s mouth (right panels).
(Reprinted from PNAS, Figures 3A, B in Catania, 2009 with permission from the author and publisher)
In conclusion, toward responses may not necessarily represent mistakes such as those derived from a misjudged assessment of the direction of the danger. At least in some cases, toward responses may be time-minimization strategies, may generate unpredictability, and may be adaptive responses to the attacks of rare predators. On the other hand, the low directionality caused by acute exposure to temperature, hypoxia, and elevated CO2, is most likely the result of malfunctioning of the sensory-motor system, which may lead to a suboptimal proportion of away responses. Furthermore, as we shall see in the section on escape trajectories below, escaping toward the predator in some cases (e.g., some larval fish, lizards, and small mammals attacked by birds) may represent a strategy to surprise and flee past the predator and reach safety before the predator can turn and pursue effectively (Domenici et al. 2011b).
8.3 Escape trajectories
8.3.1 Methodological issues
After the initial response, animals escape along a trajectory that can be evaluated using successive positions (Domenici & Blake 1993a), or by simply analyzing the heading of the body axis at a particular point in time, typically after the main initial rotational motion of the prey (Eaton & Emberley 1991). Many studies have focused on this “initial” trajectory of the escape response although some prey may undergo a series of zigzagging turns in subsequent stages of the escape (Humphries & Driver 1970). While directionality is based on the relative change in direction with respect to the threat (i.e., a turn may be toward or away from the threat; Figure 8.1), escape trajectories do not take into account the motion the prey has accomplished to achieve a given angle between its own heading and the position of the threat.
A number of analytical approaches have been used to study the angle of the escape trajectory in prey. Early work was based on linear statistics of turn angle (y-axis) as a function of stimulus angle (x-axis) (Camhi & Tom 1978; Eaton et al. 1981; Stern et al. 1997) (Figure 8.3A). This type of analysis allows one to test how the turn angle (i.e., the angle of turn measured relative to the prey’s body axis) varies with respect to the angle at which the prey is attacked. Using this type of analysis, attack angles range from 0° (i.e., tail on) to 180° (head on). Conventionally, attacks from and responses to the right are plotted as positive values, while attacks from and responses to the left are plotted as negative values. Because prey tend to escape in a direction approximately away from the threat, this type of analysis tends to yield a general decrease from the “−x + y” sector to the “+x -y” sector, which can be tested using linear regression. However, because most points are located in two Cartesian sectors (−x and y; x and −y) out of the four, significance may result even if, within each sector, turn angle is not related to attack angle. This problem can be overcome by testing each sector separately, or by pooling left and right stimuli in a single graph, i.e., using an axial rather than a circular scale (Eaton & Emberley 1991).
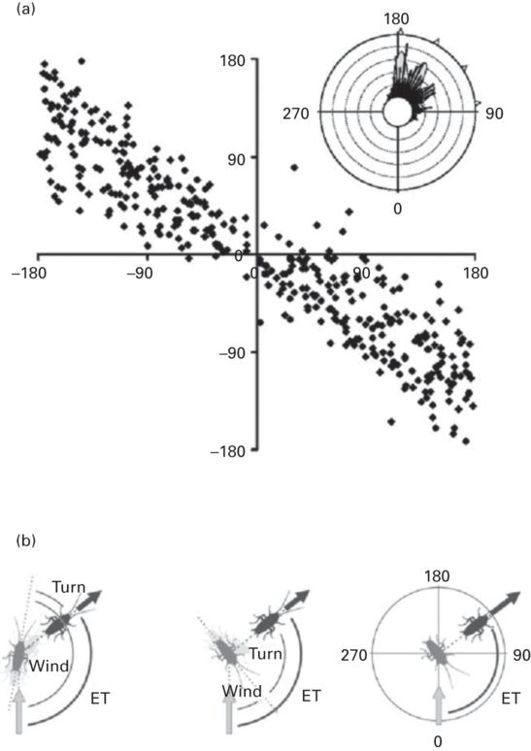
Figure 8.3
(A) Linear (cartesian) representation of turn angle (y-axis) and stimulus angle (x-axis). By convention, stimuli from and responses to the right are plotted as positive values whereas stimuli from and responses to the left are plotted as negative values (cockroach Periplaneta americana, data set 5i; N = 431; unpublished figure based on data from Domenici et al., 2008). Inset: circular representation of the data using the convention shown in (B). In the inset, responses are plotted as if the stimulus corresponding to 0° is always coming from the right of the animal. Concentric circles represent a frequency of ten. Bin frequency is five.
(B) Definitions of escape trajectory angles in toward (left panel) and away (central panel) responses. Toward and away responses are escapes in which the turn angle achieved during the initial rotation is directed toward or away from the stimulus, respectively. In this example from the cockroach, the angle subtended by the arc labeled “wind” is the stimulus angle, that by the arc labeled “turn” is the turn angle and that by the thick arc is the final escape trajectory (ET). Away and toward responses may have the same ET (shown in the right panel).
Figure 8.3A: reprinted from Journal of Experimental Biology, Figure 1A in Domenici et al. (2011b) with permission from the publisher; inset: reprinted from Current Biology, Figure 2A in Domenici et al. (2008) with permission from Elsevier; Figure 8.3B: based on Figure 5 in Booth et al. (1999) reproduced with permission of the Journal of Neuroscience.
While this approach may be useful in testing how animals adjust their turn angle relative to the stimulus, it has some drawbacks: (a) the use of a linear regression is appropriate only if, for any value of x, the y values are normally distributed, which is not necessarily the case for escape responses (Domenici et al. 2008); and (b) the hypothesis that animals respond using one or more specific headings relative to the threat cannot be tested using linear regression of turn angle vs. attack angles.
To assess the direction of the escape trajectories (ET) relative to the predator attack direction in angelfish, Domenici and Blake (1993a) used circular statistics in which ET is defined as the angle between the threat (positioned at 0°) and the escape path of the prey once the body rotation is completed (Domenici et al. 2008) or at a specific kinematic stage, such as the second axial bend in the fish escape response (Domenici & Blake 1993a). This analytical approach has been used on other species (e.g., crayfish Crangon crangon, Arnott et al. 1999; cockroaches Periplaneta americana, Domenici et al. 2008; lizards Psammodromus algirus, Martín & López 1996). Escape trajectories can be calculated as the sum of attack angle (here ranging from 0° in head-on attacks to 180° in tail-on attacks) and turn angle, where toward and away responses bear a negative and a positive sign, respectively (Figure 8.3B).
Using this method, ET can span 360° and is treated as a circular variable (Batschelet 1981; Domenici et al. 2011b; Pewsey et al. 2013). Escape trajectories in which the position of the attack remains on the same side of the prey as at the beginning of the escape response will be placed in the 0 to 180° semicircle. Conversely, if the attack ends up on the opposite side, ETs are placed in the semicircle 180° to 360°. Unless specific asymmetries occur, by convention, right and left escapes can be pooled as if all stimuli are on the right (Domenici & Blake 1993a). This type of analysis allows the pattern of the escape heading of the prey relative to the attack direction to be assessed. Some previous work has used slightly different ways of measuring ETs (discussed in Domenici et al. 2011b) although in most cases these other conventions yield the same values as the ET.
8.3.2 Theory and practice: in which direction do animals flee?
Geometric arguments (see Case A, below) suggest that there is an optimal trajectory that maximizes the chances of survival. However, this approach yields a single solution in terms of ET, and therefore does not deal with unpredictability that prevents the predator taking countermeasures. Furthermore, as we shall see, many other factors can affect ET, such as the position of the sensory organs on the prey, the subsequent ET that allows prey to track the predator, as well as the presence of refugia. Given all these considerations, a number of potential theoretical distributions can be derived (Figure 8.4), most of which are used by some prey species studied in the past.
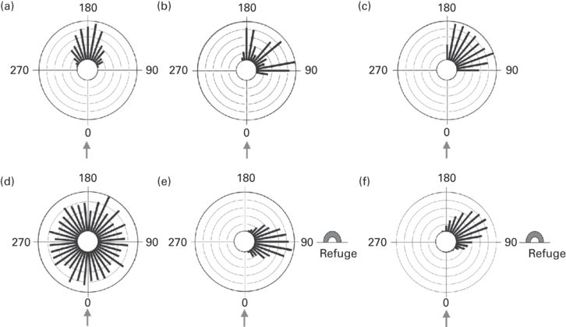
Figure 8.4
Various theoretical distributions of escape trajectories. (A) Unimodal (normal circular) distribution; (B) multimodal distribution; (C) random distribution within a limited angular range; (D) random distribution spanning 360°; (E) unimodal (normal circular) distribution directed toward the refuge; (F) unimodal (normal circular) distribution directed midway between the refuge and away from the threat. (See text for more details.)
(Reprinted from Journal of Experimental Biology, Figure 1 in Domenici et al. 2011a, with permission from the publisher)
8.3.2.1 Case A: a single, optimal trajectory (Figure 8.4A)
According to geometric models (Weihs & Webb 1984; Arnott et al. 1999; Domenici 2002), a single trajectory allows prey to maximize the distance from the predator for any given combination of predator and prey speeds. According to these models, ETs range over 90 to 180°. While most previous work on escape responses show this range of trajectories (Domenici et al. 2011b), we are not aware of any study that has directly tested the relationship between the relative speeds of predator and prey and ETs, although birds, for example, are known to use different ETs depending on the approach speed of the predator (Domenici et al. 2011b). Furthermore, prey are able to produce a “compromise” ET when attacked by predators from two different directions (Cooper et al. 2007). In addition to the idea of maximizing distance from the threat, some previous work has considered the need prey can have to track the predator while escaping. For example, whiting (Marlangius merlangus) escape at 135° and this was suggested to maximize distance from the threat while keeping the predator within the visual field (Hall et al. 1986).
Visual tracking while escaping has also been found in a number of arthropods. The haematophagous bug (Triatoma infestans) orients itself at an angle of about 120° relative to an approaching object (Lazzari & Varju 1990; Figure 8.5A). Because its visual field is about 140°, Lazzari and Varju (1990) suggest that keeping the threat at 120° gives the prey a safety factor of a few degrees, which prevents the predator from entering the blind zone as a result of small variations in relative motions. Nevertheless, the resulting distribution of observed ETs is quite large, spanning approximately 90°, from 70° to 160° (Lazzari & Varju 1990). In some side-walking species of crabs, escaping at approximately 180° allows tracking of the predator as a result of a combination of a translatory motion away from the threat (at 180°) and a rotation mechanism that allows the crab to keep the threat at 90° from the body axis (Layne & Land 1995; Oliva et al. 2007). Planktonic prey showed an escape response at 90° from the flow field of the predator, maximizing distance away from it (Jakobsen 2002). All of these examples yield a single optimal trajectory, although data show some degree of variability (Lazzari & Varju 1990). It would be interesting to test whether this variability is simply the result of noise in the system (i.e., measurement errors, limits in the animal’s accuracy), or whether it has a function in increasing the unpredictability of the response.
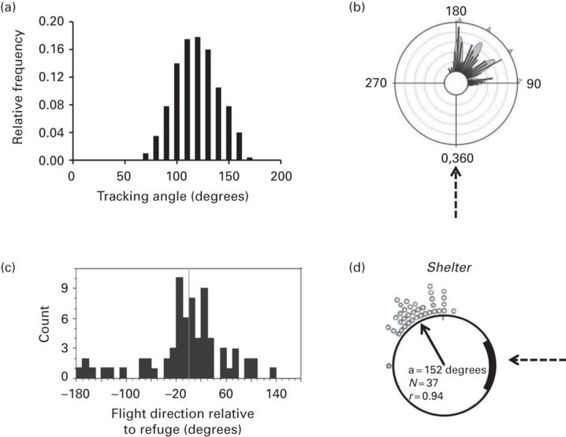
Figure 8.5
Examples of various escape strategies. (A) Triatoma infestans escapes using a single trajectory (about 120°) away from the stimulus, which allows tracking the threat. (B) Cockroaches (Periplaneta americana) escape using multimodal escape trajectories away from the threat (represented by the dashed line), thus producing unpredictability in their escape (C) Lizards (Uta stansburiana) escape in the direction of the refuge. (D) Blue crab Callinestes sapidus escape in a direction that is midway between reaching the shelter and escaping from the threat (represented by the dashed line).
(Figure 8.5A modified from Journal of Comparative Physiology A, Figure 4B in Lazzari and Varju (1990) with permission from the publisher. Figure 8.5B reprinted from Current Biology, Figure 2B in Domenici et al. (2008) with permission from Elsevier. Figure 8.5C reprinted from Canadian Journal of Zoology, Figure 3A in Zani et al. (2009), with permission from the publisher. Figure 8.5D reprinted from Animal Behaviour, Figure 5D in Woodbury (1986), with permission from the publisher)
8.3.2.2 Cases B and C: preferred trajectories (Figure 8.4B) and random ETs within a limited angular sector (Figure 8.4C)
For a single event of a predator attacking a prey, we might expect a single optimal solution. However, at least in some predator-prey systems, repeating the same strategy over and over would make the prey’s response predictable, allowing learning, or even natural selection of countermeasures by predators. As alternatives to a single optimal trajectory, prey could escape using random ETs within a limited angular sector or use random selections from a finite range of preferred ETs. The limits in the angular sector exclude the use of trajectories toward the predator, while keeping enough variability to restrict predator countermeasures. These two strategies are discussed here together, because (a) they are likely to yield similar results in terms of prey escape success, although the neural basis of the escape behavior may differ between the two strategies, and (b) they are difficult to distinguish experimentally unless large sample sizes are used.
The different outcome, in terms of probability to escape, when using a single, optimal trajectory, vs. multiple trajectories within a given sector, is illustrated in Figure 8.6. For the “first” encounter (i.e., between a naïve predator and a naïve prey), the escape probability is higher (the length of the escape vector in Figure 8.6A) when using the optimal ET. However, when considering successive events, the probability of escape success decreases when using the “optimal ET” strategy (Figure 8.6B), because of predator countermeasures to predictable prey ETs. On the other hand, the use of variable ETs (Figure 8.6C) prevents this decrease in escape probability. As a result, although for each single predator-prey encounter, prey escape probability is lower than when using an optimal ET with a naïve predator, the mean of the escape probability calculated across all events is higher in the “high variability” than in the “optimal ET” strategy.
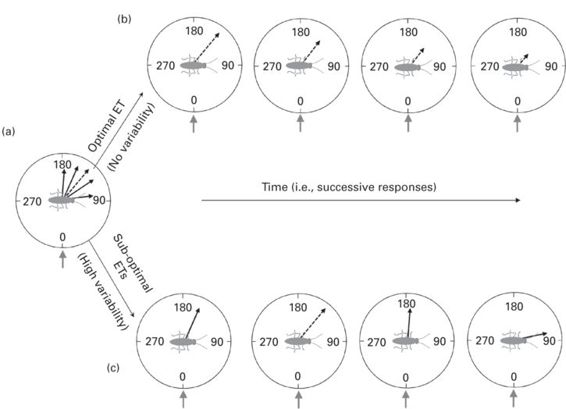
Figure 8.6
Diagram showing the theoretical effect of multiple attacks spread over time (predator positioned at 0°, grey arrow) and ETs on escape probability (represented by the length of the escape vector).(A) An ET with maximum escape probability (dotted arrow) with other ETs (full arrows) with lower probabilities of escape as a function of their angular distance from the optimal ET. (B) The ET with the highest escape probability is used in all four successive responses. Escape probability decreases as a result of predators learning to anticipate which ET will be used in successive responses. (C) Different ETs (both optimal and suboptimal) are taken in four successive responses. The escape probability does not decrease with successive responses because predators cannot learn which ET will be taken.
(Reprinted from Journal of Experimental Biology, Figure 3 in Domenici et al. (2011a), with permission from the publisher)
Escaping using variable or multiple trajectories appears to be a common strategy in many prey species from different taxa (Domenici et al. 2011b). In most cases, ETs tend to be within the 90 to 180° sector because prey tend to keep the threat on the side of the initial stimulation, rather than overturning (i.e., ETs in a semicircle 180 to 360° are rare) (Domenici et al. 2011b). A number of prey species (including fish, frogs, plankton, and deer; reviewed in Domenici et al. 2011b) show two main trajectories, typically at 180° and at approximately 90 to 130°. These have been observed in various species of fish, and were suggested to correspond to maximizing distance from the threat (180°) and keeping it within an angular field that allows tracking of the predator (130°) (Domenici & Blake 1993a; Domenici & Batty 1997).
Unlike side-walking crabs, soldier crabs (Mictyris longicarpus) walk forward, and therefore do not have the option of escaping away from a predator while maintaining visual contact. Soldier crabs show two main ETs (150° and 210°) which are symmetric with respect to 180°, and may serve to track the threat within the limits of the visual field (Domenici & Blake 1993a).
Some species of birds use different trajectories depending of the approach speed of the predator, with high and low predator speeds triggering escape response directed at 90° and 180°, respectively. This behavior is in line with the prediction of the models based on attack speeds, although only the extreme trajectories were observed. Other animals, including some larval fish, lizards, and small mammals attacked by birds, may escape using alternative directions; either away or toward the threat, where the latter may represent a strategy to surprise and flee past the predator before it can adjust its trajectory (Domenici et al. 2011b).
Some insect species appear to escape using more than two characteristic directions. This pattern has been fully demonstrated in cockroaches, both at the population and at the individual level (Figure 8.5B; Domenici et al. 2008). Each single cockroach escaped either at 90°, 120°, 150°, or 180° away from the threat. Although other insect species show highly variable ETs, whether this pattern is due to multiple peaks or random noise awaits further work using large sample sizes. Partitioning the two strategies (random noise vs. multiple peaks) will be particularly useful for elucidating the underlying mechanism generating escape variability although both tactics may allow prey to generate the unpredictability necessary to prevent predator countermeasures.
8.3.2.3 Case D: random trajectories spanning 360° relative to the threat (Figure 8.4D)
This strategy represents the ultimate unpredictability. Importantly, it includes situations where prey would move directly toward the predator. This creates a question: is the potential cost of occasionally going toward the predator outweighed by the extreme unpredictability? Given that responses toward the predator are rare, it appears that other strategies generating variability without including a response toward the threat are more common (e.g., Cases B and C). There are, however, a couple of specific cases that may, at least potentially, generate random trajectories when measured relative to the threat. Springtails (collembolans Heteromurus nitidus) and the common house mosquito (Culex pipiens) pupae escape in a fixed direction relative to their body axis (von Christian 1978; Brackenbury 1999), which should result in random ETs measured relative to the threat. This strategy should result in highly unpredictable directions of escape, unless the predator can forecast ETs based on the body orientation of the prey before the attack.
Another example that could, at least theoretically, yield random trajectories, is based on “nonsense orientation” exhibited by some species of birds (Thake 1981; Hart et al. 2013). These birds (e.g., mallards Anas platyrhynchos) appear to fly along a common preferred direction upon release, which does not appear to be related to the migration or homing direction. Hart et al. (2013) suggest that this common direction (fixed relative to cardinal points) may facilitate flock formation in an escape context. The advantage of such strategy would be that individuals of a flock will minimize decision time and will not disperse the flock. This strategy would theoretically result in random ETs when measured relative to the threat, unless the threat itself comes from a preferred geographical direction, as is the case of some predators (Červený et al. 2011).
8.3.2.4 Case E: ETs toward a refuge (Figure 8.4E)
Although more work is needed to test the effect of refuges in laboratory and field conditions, it is clear that the ETs of species living in a complex environment where shelters and burrows are available may be affected by such structures. This is certainly the case of many species of lizards and small mammals (see Chapters 3 and 5). A refuge may lead to ultimate protection from predators, and therefore, direction to the refuge may even override the importance of the direction of approach of a threat. The relative importance of the position of the predator and that of the refuge may depend on their distance from the prey, and in fact the effect of refuges decreases with increasing distance from the prey (e.g., in lizards Leiocephalus carinatus, Cooper 2007; Uta stansburiana, Zani et al. 2009; Figure 8.5C).
8.3.2.5 Case F: intermediate strategy: away from the threat and toward a refuge (Figure 8.4F)
In some cases, prey may be affected by both predator and refuge position, and the resulting ET may reflect a compromise between moving away from the threat and approaching the refuge. This is the case for blue crabs (Callinestes sapidus), which have an escape trajectory approximately midway between maximizing distance from the predator and reaching cover in the shortest time (Woodbury 1986; Figure 8.5D).
8.3.2.6 Overall trends
Previous work discussed above suggests that there is no single optimal ET. Rather, the ETs used by the prey will largely depend on the environmental context, the design of the prey’s sensory system, and prey maneuverability. The most common escape strategies are (1) high ET variability, which may be due to multiple peaks or to wide ET distributions; (2) ETs that allow prey to continually track the threat; and (3) ETs directed toward a refuge. While high ET variability provides high unpredictability, tracking the threat and fleeing toward a refuge are relatively predictable in terms of direction.
The specific strategy used by the prey may be taxon and context specific: it may depend on the type of attack and the structural complexity of the habitat. Clearly, in some contexts, the need for unpredictability is overridden by the need to track the predator or to reach a refuge. Predator tracking may be more important in relatively slow and distant interactions, in which the prey can compensate for the motion of the predator. Similarly, reaching a refuge may be more beneficial than escaping in unpredictable directions when the refuge is nearby.
8.3.3 The relative importance of speed and maneuverability in predators chasing prey
Work on predator-prey interactions in fish shows that both prey speed and ET are determinants of the prey’s escape success (Walker et al. 2005). However, in cases in which escape speed is traded off with reaching a trajectory away from the threat requiring a large turning angle, fish were shown to escape at submaximal speeds in the direction of the preferred trajectories (ranging from 130 to 180° away from the threat) (Domenici & Blake 1993a,b). Predators are usually larger than their prey, and therefore in most cases they are also faster because speed tends to increase with body size in many taxa (Peters 1983). Therefore if predator-prey gambits were to occur in a straight line, predators would generally be able to catch up with their prey. However, small animals tend to be more maneuverable than large ones, having smaller turning radii and higher turning rates (Howland 1974; Domenici 2001). From this perspective, frequent turning, such as the zigzagging, displayed by many prey when chased, may allow prey to gain ground on predators, in addition to increasing the unpredictability of their escape path.
Furthermore, it has generally been assumed that this so-called protean behavior benefits the prey. This benefit may remove the advantage the predator would have in “cutting corners” in its pursuit trajectory so as to close on its prey. Alternatively (or additionally) it may induce the predator to move more slowly so as to retain an ability to respond to changes in direction more quickly, or it may reduce the ability of the predator to quickly make good responses simply because more cognitive attention is required for tracking zigzagging prey. Any of these mechanisms might increase the time that the predator requires to capture the prey (thus making the prey less attractive) and/or increase the chance of the chase being unsuccessful from the predator’s viewpoint. It is further assumed that the essence of the behavior is unpredictability (Humphries & Driver 1967; 1970), and it is this unpredictability in the future trajectory that makes capture more difficult for predators.
The term “protean behavior” was introduced by Humphries and Driver (1967), and very carefully explored in a subsequent highly influential monograph (Driver & Humphries 1988). While that book provides descriptions of a wealth of observational studies, the most explicit experimental test of the idea is much more recent (Jones et al. 2011). Jones et al. (2011) tasked human volunteers to “capture” tadpole-like representations of prey that swam around a computer screen. Capture involved moving a cursor over the prey by means of the computer’s mouse. The prey’s movements were varied according to a programmed algorithm. All individuals had a fixed probability per unit time of initiating a change in direction. For “control” individuals the turn angle selected was chosen randomly from within relatively narrow bounds, such that the long-term trajectory of the prey was relatively smooth; whereas “protean” individuals selected their turn angles from a much wider distribution and so had trajectories that included occasional abrupt turns. The human subjects found the “protean” prey substantially more difficult to capture. In this case, the prey moving along an unpredictable path benefitted from lower capture success. There are, however, other potential ways a prey could benefit from protean behavior. First, a given prey could benefit from a lower capture probability with a given predator that makes a second attack, since the prey response to the second attack will be different than in the first attack, avoiding costs through predator learning. Second, a given prey may benefit from its unpredictable behavior with respect to a whole population of predators. In this case, individuals in the whole prey population could benefit from protean behavior because the predator population cannot use any countermeasures for predicting the response of the prey.
Jones et al.’s (2011) work is a starting point for the exploration of the influence of protean behavior on predator-prey encounters. One useful extension of the work would be to allow the prey population to evolve subject to selection imposed by the human predators in order to explore what the optimal strategy is in terms of motion that hinders prey capture. This is very much like the approach that has been used to study adaptive coloration in artificial prey presented on a computer screen to birds trained to peck at discovered targets to obtain a reward (Bond & Kamil 2006). Based on analysis of the trajectory of the “predatory” cursor combined with eye-tracking equipment, it should be possible to study the gaze of human subjects to gain an improved understanding of the tactics used by humans in their prey pursuit and why protean behavior is able to exploit cognitive limitations of predators. This in turn might inform a co-evolutionary system in which the human predators are replaced by computer-generated predators whose actions are controlled by a set of rules that can be subject to selection and modification in just the same way as the prey.
However, perhaps the most exciting way to progress and expand on the work of Jones et al. (2011) would to be to introduce realistic physical dynamics for both the prey and the predator. In the simulations of Jones et al. (2011) both the prey and predators moved at a constant forward speed that is unaffected by turning. In reality there are physical constraints on individuals that determine turning rates; and trade-offs between forward speed and turning radius, and between speed and maneuverability (Domenici 2001, 2003). We see great advantage in adding realistic physical constraints to the cognitive limitations considered by Jones et al. (2011). Exploration of how this changes the predictions of the previous study would be very fruitful.
Methods of incorporating physical relationships and constraints have a relatively long history, stretching back at least as far as the influential modeling study of Howland (1974). This paper explored a “turning gambit” whereby prey that has a slower straight-line speed than a pursuing predator might be able to escape the predator. This is based on a number of modeling “rules.” First, slower prey speed comes with a compensatory advantage of smaller turning radius. Second, the prey can gauge the correct time to initiate a turn (in terms of the proximity of the predator behind it). Third, sufficient increase in separation, as a result of this maneuver, would make the predator return to chasing it from immediately behind at greater than the critical distance at which maneuvers are triggered. Notice that these turns can be predictable and the benefit to the prey comes from physics rather than cognition. Hence, it would be a very natural extension of this work to introduce more unpredictable “protean” movements by prey and explore whether there are circumstances where the cognitive benefits of confusing the predator can overcome any dynamical costs of this behavior. Thus, the marriage of the cognitive and physical approaches to understanding maneuvering in predator-prey chases offers rewards to both theoretical traditions. Another potentially useful addition to the theory would be explicit consideration of differing rates at which energy is used in different maneuvers.
8.3.4 Modification of escape trajectories in the presence of conspecifics
For many animals that live in groups, it is not possible for the prey to detect the specific individual that has been targeted, and indeed the predator may not have selected a specific target when the point when prey start fleeing. This is especially likely when predatory attacks are launched from outside the group. Thus, a number of individuals may flee almost simultaneously. The modification of individual trajectories in the presence of conspecifics may have a number of functions: collision avoidance, placing conspecifics between a fleeing individuals and the predator (selfish herd effects), and predator confusion.
It seems clear that fleeing individuals should avoid colliding into each other, because such collisions might cause injury, attract the attention of the predator, and impair flight. It has long been postulated that avoidance of collisions might influence ETs (Hall et al. 1986; Domenici & Batty 1997), and that avoidance of collisions may explain the similar orientation of nearby individuals often seen in fish shoals and bird flocks. However, empirical exploration of this is exceptionally challenging and evidence of predators taking advantage of collisions is limited to a small number of anecdotal observations.
The selfish herd hypothesis was first put forward by Hamilton (1971). He proposed that when predators attack the first prey individual that comes within a certain distance of them, this behavior should select for prey aggregation by prey. By being part of an aggregation, an individual reduces the size of its “domain of danger,” the region of space where, if a predator is present at any point, the focal individual would be the nearest individual to the predator. Hence, aggregations can form not necessarily as part of a collective defense mechanism, but because a number of individuals are all selfishly trying to place other individuals between themselves and possible points on the predator’s expected trajectory. Increased aggregation in the face of imminent threat of predatory attack has been recorded for a number of taxa (reviewed by Krause & Ruxton 2002). Several modeling studies have explored paths that individuals might adopt, which can explain this increased aggregation through selfish-herd effects. Viscido et al. (2001, 2002) and Reluga and Viscido (2005), in simulations parameterized by their study of groups of fiddler crabs (Uca), demonstrated that even when flight away from an approaching predator occurs, selfish avoidance of danger can lead to an increase in aggregation.
The confusion effect describes the decreased likelihood that a predator will successfully catch any prey as group size of moving prey increases. The mechanism behind this is essentially “sensory overload.” In predators faced with very high levels of informational input, the sensory and cognitive systems may struggle to track one particular prey item without being distracted by others. This effect has been demonstrated in simulation models that use neural networks to simulate predator sensory and cognitive systems (Krakauer 1995; Tosh et al. 2006). It has also been demonstrated across a wide range of predator-prey pairs (reviewed by Jeschke & Tollrian 2007; see also Ioannou et al. 2008) for an effective combination of modeling and empirical testing to demonstrate that reduced attack success can be linked to increased spatial targeting error. Jeschke and Tollrian (2007) made the important point that although the confusion effect is often discussed with respect to visual predators, the available empirical evidence suggests that it may be even stronger in tactile predators. The confusion effect seems particularly strong when prey individuals look and behave similarly (see Krakauer 1995 for theory and Landeau & Terborgh 1986 for empirical evidence). This may impact the behavior shown by fleeing prey, selecting for similarity in descriptors of their movement.
Recent theory and empirical evidence (Tosh et al. 2006; Ruxton et al. 2007) has demonstrated that behaviors that produce tight cohesion of a group may not be required for prey to benefit from predator confusion, and that complex coordinated behaviors between prey are not required. This issue was further explored by Jones et al. (2011) in experiments in which humans were challenged to capture (using a cursor controlled by a mouse) a specific target from an aggregation of targets on a computer screen. Protean prey (that showed less predictable movement trajectories) were more difficult to capture, but this effect was not influenced by the number of targets. That is, protean escape behaviors provided a direct antipredator benefit but did not enhance the confusion effect (which had previously been demonstrated to occur in a similar experimental set-up by Tosh et al. 2006). Recently, Ioannou et al. (2012) demonstrated that similarity of motion between group members could offer enhanced protection. They allowed real predators to hunt mobile virtual prey (computer-controlled images projected onto the side of the predator fish’s tank). Prey whose movement rules included a tendency to be attracted toward, and to align direction of travel with, near neighbors, tended to form mobile coordinated groups that were rarely attacked compared to more isolated individuals.
The individual’s ET can be influenced by the behavior of simultaneously fleeing nearby individuals. However, this can occur through a number of different and non-exclusive mechanisms, and our understanding of the relative importance of these mechanisms is still very rudimentary. A similar conclusion can be drawn at a higher level about trajectories more generally. In this section we have considered a number of factors that are likely to influence escape trajectories, but model systems have yet to emerge that would help us to probe the relative importance of these different influences.
8.4 Sensory defenses and signaling linked to fleeing
Some prey can enhance their ability to flee from predators by communicating with other individuals. Often predators may approach or chase prey that are impossible or too expensive (in time, energy, risk of injury, risk of disturbing other potential prey, and/or risk of attracting hyperpredators) to catch (see Chapters 2 and 10). If the prey can honestly inform a chasing predator of such a situation and the predator responds by breaking off the chase, then both parties benefit. However, it might appear that the prey could benefit by dishonest signaling in this regard, causing the predator to break off its attack on occasions when this would not be in the predator’s best interests. In the first part of this section we explore the conditions required for more or less honest signaling of this nature to evolve and be maintained. There may also be occasions when the fleeing prey should signal to the chasing predator that although it may be possible and economic to catch the prey, subduing the caught individual will be impossible or prohibitively expensive, and we explore such signaling also. Finally, we explore signaling to other individuals that might occur because alerted individuals can be induced to break up the chase (e.g., by mobbing the predator).
8.4.1 Signaling vigor to predators
During pursuit some prey may signal to predators that the prey will be difficult to catch. The key issue for researchers is to understand under what conditions such a signal might be reliable, given that low-quality prey apparently have strong incentive to signal dishonestly. Vega-Redondo and Hasson (1993) explored this issue theoretically. Their key finding is that an evolutionarily stable signaling equilibrium exists at which the two prey types issue different signals and the predator responds differentially to those signals (attacking one type of signaler, but not the other). The equilibrium is evolutionarily stable, providing a number of conditions are satisfied. The key conditions are:
1. An attack on a higher quality individual is less likely to be successful than an attack on a poor-quality individual if both signal identically.
2. If intensity of signaling increases then the relative decrease in the probability of an attack being successful is greater for the higher quality individual than the lower quality one. Thus the cost of a more intensive signal is greater for a low-quality individual than for a high-quality individual.
3. If signal intensity becomes small enough then the predator’s attack is always successful.
Tests of this theory are relatively scarce. Cresswell (1994) reported on extensive and carefully recorded naturally occurring predation events by a raptorial bird (merlin, Falco columbarius) attacking a songbird (skylark, Alauda arvensis). The merlin clearly selected a skylark for pursuit before any song by the skylark was heard. If singing by the skylark was heard (by Cresswell), then it started very soon after the pursuit began. For pursuits where the merlin gave up without capture, merlins chased non-singing or poorly singing skylarks for longer periods compared to skylarks that sang well. These chases often exceeded five minutes in duration, implying that the costs of not signaling and not responding to the signal were high for the skylark and merlin, respectively. Merlins were more likely to catch non-singing than singing skylarks. Skylarks that did not sing when attacked were more likely to attempt to hide from the merlin rather than outfly it. The author noted that it has not been demonstrated that singing while being pursued is costly even though singing in the absence of pursuit is energetically demanding for skylarks (Cresswell 1994). In all other respects this study comes very close to a convincing demonstration of pursuit-deterrence signaling.
8.4.2 Cues or signals of physical or chemical defenses revealed during fleeing
For many prey, fleeing slowly on a predictable trajectory will increase their risk of predation, especially for undefended prey that can be subdued easily and consumed when caught. However, it is possible that simply fleeing slowly on a predictable trajectory (e.g., travelling slowly on a constant heading unaffected by predator position) is used as a cue (and perhaps even an evolved signal) that the fleeing organism is sufficiently defended to be difficult to subdue or unpalatable to eat if caught. Fleeing may still be advantageous to such defended individuals because attacks may be costly to the prey even if they are unsuccessful. Marden and Chai (1991) surveyed 124 Neotropical butterfly species and found that those that were sufficiently chemically defended to be unpalatable to vertebrate predators had a lower fraction of their body devoted to flight muscles than undefended species; the same was true for mimics of such species. Srygley (1994) reported similar results in a comparative study of 18 species of the butterfly tribe Heliconiini and 10 of their non-heliconiine co-mimics. Palatable species that were not mimics of unpalatable species had increased flight speed and maneuverability. Srygley and Dudley (1993) in experiments in cages found that relative to distasteful species, palatable butterfly species flew faster and were more able to maneuver successfully to evade attacks by insectivorous birds. Sluggish movement seems to be a cue that could be used by predators.
Hatle et al. (2001) demonstrated that in frog attacks on lubber grasshoppers, sluggish movement and aversive odors act together to reduce predation rates, whereas neither trait was effective alone. Hatle et al. (2002) explored prey selection when the Northern leopard frog (Lithobates pipiens) was presented aggregations of grasshoppers. The fastest moving individual in an aggregation of such aposematic individuals was most vulnerable to attack. Sluggish fleeing, then, can be used by predators as a somewhat reliable cue that the prey would be unattractive to attack. What remains unclear is if this slow flight of defended individuals is simply a cue driven by a lack of selection pressure to invest in evasion compared to the undefended, or whether this cue has evolved into a signal that has a communicative function. Sherratt et al. (2004) used a simulation model to show that such signals are theoretically possible, but such signaling has not been empirically demonstrated.
8.4.3 Signaling to others during fleeing
Fleeing individuals may signal to animals other than the pursuing individual. For instance, individuals might signal to request for help from individuals that might themselves benefit from the pursuit of the focal individual being unsuccessful. For example, a juvenile calling to a parent that might be able to attack the pursuer. A fleeing prey might signal to encourage conspecifics or heterospecifics to mob the pursuer because the mobbers benefit from the attack on the focal individual failing through kin selection, or because the predator is less likely to return to the same area to hunt after a failed attack. Another often-postulated idea is that calls by the fleeing individual might alert either predators or competitors of the pursuing animal. Intervention by such animals might provide increased potential for the signaler to escape.
Alarm calls (communicating information about imminent danger of predation) have been intensively studied with respect to their informational content, the ecological correlates of their use, and the responsiveness of conspecific and heterospecific receivers (see Caro 2005, for an overview). However, the linkage between calling and any other antipredatory behaviors of the caller have been almost entirely neglected. In particular, it is likely that some callers will also flee from the predator, and some calling may occur during flight. It would be interesting to explore whether such calling is different from calls emitted prior to fleeing or those emitted by non-fleeing individuals.
So called “distress calls” or “fear screams” that are produced by a range of birds, mammals, and anurans when physically contacted by a predator have also been studied widely (see Ruxton et al. 2004; Caro 2005, for reviews). Such screams are variously suggested to startle predators, attract competitors of the predator, encourage mobbing, or act as a warning to kin. Many of these benefits might be enhanced if such calls were initiated prior to the prey actually falling into the grip of the predator. However, such anticipatory distress calls have not been widely reported, nor has there been consideration of whether such anticipation might be excessively costly or ineffective. We would welcome exploration of the effects of distress calls on probability of escape and of whether distress calls are initiated prior to capture (while the prey is still in flight from the predator) and if not, why not.
8.5 Conclusions
Behavioral choices by prey during fleeing can influence the chance of being captured in multiple ways. In terms of the locomotor component of fleeing, prey have to deal with the laws of biomechanics, the performance of their sensory systems, and the need to generate unpredictability. Signaling while fleeing may increase the chances of survival because signaling then can deter a predator from chasing and it can strengthen the effect of collective antipredator behaviors. We believe that progress in this field will require integration of a number of fields of biology, such as behavioral ecology, biomechanics, and sensory biology. We thus hope to have pointed to some relatively tractable areas where current understanding of fleeing could be strengthened.
References
Allan, B. J. M., Miller, G. M., McCormick, M. I., Domenici, P. & Munday, P. L. (2014). Parental effects improve escape performance of juvenile reef fish in a high-CO2 world. Proceedings of the Royal Society B: Biological Sciences, 281, 2013-2179.
Arnott, S. A., Neil, D. M. & Ansell, A. D. (1999). Escape trajectories of the brown shrimp Crangon crangon, and a theoretical consideration of initial escape angles from predators. Journal of Experimental Biology, 202, 193-209.
Batschelet, E. (1981). Circular Statistics in Biology. New York: Academic Press.
Batty, R. S. (1989). Escape responses of herring larvae to visual stimuli. Journal of the Marine Biological Association of the United Kingdom, 69, 647-654.
Blaxter, J. H. S. & Batty, R. S. (1985). The development of startle responses in herring larvae. Journal of the Marine Biological Association of the United Kingdom, 65, 737-750.
Blaxter, J. H. S. & Batty, R. S. (1987). Comparisons of herring behavior in the light and dark: Changes in activity and responses to sound. Journal of the Marine Biological Association of the United Kingdom, 67, 849-859.
Bond, A. B. & Kamil, A. C. (2006). Spatial heterogeneity, predator cognition, and the evolution of color polymorphism in virtual prey. Proceedings of the National Academy of Sciences of the United States of America, 103, 3214-3219.
Booth, D., Marie, B., Domenici, P., Blagburn, J. M. & Bacon, J. P. (1999). Transcriptional control of Journal of Neuroscience, 29, 7181-7190.
Brackenbury, J. (1999). Regulation of swimming in the Culex pipiens (Diptera, Culicidae) pupa: Kinematics and locomotory trajectories. Journal of Experimental Biology, 202, 2521-2529.
Camhi, J. M. & Tom, W. (1978). The escape behaviour of the cockroach Periplaneta americana. 1. Turning response to wind puffs. Journal of Comparative Physiology A, 128, 193-201.
Cantalupo, C., Bisazza, A. & Vallortigara, G. (1995). Lateralization of predator-evasion response in a teleost fish (Girardinus falcatus). Neuropsychologia, 33, 1637-1646.
Caro, T. M. (2005). Antipredator Defenses in Birds and Mammals. Chicago, IL: University of Chicago Press.
Catania, K. C. (2009). Tentacled snakes turn C-starts to their advantage and predict future prey behavior. Proceedings of the National Academy of Sciences of the United States of America, 106, 11183-11187.
Červený, J., Begall, S., Koubek, P., Nováková, P. & Burda, H. (2011). Directional preference may enhance hunting accuracy in foraging foxes. Biology Letters, 7, 355-357.
Chittka, L., Skorupski, P. & Raine, N. E. (2009). Speed-accuracy tradeoffs in animal decision making. Trends in Ecology & Evolution, 24, 400-407.
Comer, C. M. & Dowd, J. P. (1987). Escape turning behaviour of the cockroach. Changes in directionality induced by unilateral lesions of the abdominal nervous system. Journal of Comparative Physiology A, 160, 571-583.
Comer, C. (2009). Behavioral biology: Inside the mind of Proteus? Current Biology, 19, R27-R28.
Cooper, W. E. (2007). Escape and its relationship to pursuit-deterrent signalling in the cuban curly-tailed lizard Leiocephalus carinatus. Herpetologica, 63, 144-150.
Cooper, W. E., Perez-Mellado, V. & Hawlena, D. (2007). Number, speeds, and approach paths of predators affect escape behavior by the Balearic Lizard, Podarcis lilfordi. Journal of Herpetology, 41, 197-204.
Cresswell, W. E. (1994). Song as a pursuit-deterrent signal, and its occurrence relative to other anti-predator behaviours of skylark (Alauda arvensis) on attack by merlins (Falco columbarius). Behavioral Ecology & Sociobiology, 23, 217-223.
Domenici, P. (2001). The scaling of locomotor performance in predator prey encounters: From fish to killer whales. Comparative Biochemistry and Physiology A, 131, 169-182.
Domenici, P. (2002). The visually mediated escape response in fish: Predicting prey responsiveness and the locomotor behaviour of predators and prey. Marine and Freshwater Behaviour and Physiology, 35, 87-110.
Domenici, P. (2003). Habitat, body design and the swimming performance of fish. In Vertebrate Biomechanics and Evolution. Oxford: Bios Scientific Publishers, pp. 137-160.
Domenici, P. (2010). Context-dependent variability in the components of fish escape response: Integrating locomotor performance and behavior. Journal of Experimental Zoology, 313A, 59-79.
Domenici, P. & Batty, R. S. (1997). Escape behaviour of solitary herring (Clupea harengus) and comparisons with schooling individuals. Marine Biology, 128, 29-38.
Domenici, P. & Blake, R. W. (1993a). Escape trajectories in angelfish (Pterophyllum eimekei). Journal of Experimental Biology, 177, 253-272.
Domenici, P. & Blake, R. W. (1993b). The effect of size on the kinematics and performance of angelfish (Pterophyllum eimekei). Canadian Journal of Zoology, 71, 2319-2326.
Domenici, P., Lefrançois, C. & Shingles, A. (2007). Hypoxia and the anti-predator behaviour of fishes. Philosophical Transactions of the Royal Society, B, 362, 2105-2121.
Domenici, P., Booth, D., Blagburn, J. M. & Bacon, J. P. (2008). Cockroaches keep predators guessing by using preferred escape trajectories. Current Biology, 18, 1792-1796.
Domenici, P., Booth, D., Blagburn, J. M. & Bacon, J. P. (2009). Escaping away from and towards a threat: The cockroach’s strategy for staying alive. Communicative and Integrative Biology, 2, 497-500.
Domenici, P., Blagburn, J.M. & Bacon, J.P. (2011a). Animal escapology I: Theoretical issues and emerging trends in escape trajectories. Journal of Experimental Biology, 214, 2463-2473.
Domenici, P., Blagburn, J.M. & Bacon, J.P. (2011b). Animal escapology II: Escape trajectorycase studies. Journal of Experimental Biology, 214, 2474-2494.
Driver, P. M. & Humphries, D. A. (1988). Protean Behavior. Oxford: Clarendon Press.
Eaton, R. C. & Emberley, D. S. (1991). How stimulus direction determines the trajectory of the Mauthner-initiated escape response in a teleost fish. Journal of Experimental Biology, 161, 469-487.
Eaton, R. C., Lavender, W. A. & Wieland, C. M. (1981). Identification of Mauthner-initiated response patterns in goldfish: Evidence from simultaneous cinematography and electrophysiology. Journal of Comparative Physiology A, 144, 521-531.
Edut, S. & Eilam, D. (2004). Protean behavior under barn-owl attack: Voles alternate between freezing and fleeing and spiny mice flee in alternating patterns. Behavioural Brain Research, 155, 207-216.
Godin, J.-G. J. (1997). Evading predators. In Behavioural Ecology of Teleost Fishes. Oxford: Oxford University Press, pp. 191-236.
Hall, S. J., Wardle, C. S. & Maclennan, D. N. (1986). Predator evasion in a fish school: Test of a model for the fountain effect. Marine Biology, 91, 143-148.
Hamilton, W. D. (1971). Geometry of the selfish herd. Journal of Theoretical Biology, 31, 295-311
Hart, V., Malkemper, E. P., Kusta, T. et al. (2013). Directional compass preference for landing in water birds. Frontiers in Zoology, 10, 38.
Hatle, J. D., Salazar, B. A. & Whitman. D. W. (2001). Sluggish movement and repugnant odor are positively interacting insect defensive traits in encounters with frogs. Journal of Insect Behaviour, 14, 479-496.
Hatle, J. D., Salazar, B. A. & Whitman, D. W. (2002). Survival advantage of sluggish individuals in aggregations of aposematic prey, during encounters with ambush predators. Evolutionary Ecology, 16, 415-431
Heuts, B. A. (1999). Lateralization of trunk muscle volume, and lateralization of swimming turns of fish responding to external stimuli. Behavioural Processes, 47, 113-124.
Howland, H. C. (1974). Optimal strategies for predator avoidance: The relative importance of speed and manoeuvrability. Journal of Theoretical Biology, 134, 56-76.
Humphries, D. A. & Driver, P. M. (1967). Erratic display as a device against predators. Science, 156, 1767.
Humphries, D. A. & Driver, P. M. (1970). Protean defence by prey animals. Oecologia, 5, 285-302.
Ingle, D. J. & Hoff, K. V. (1990). Visually elicited evasive behavior in frogs. Bioscience, 40, 284-291.
Ioannou, C. C., Tosh, C. R., Neville, L. & Krause, J. (2008). The confusion effect: From neural networks to reduced predation risk. Behavioral Ecology, 19, 126-130.
Ioannou, C. C., Guttal, V. & Couzin, I. D. (2012). Predatory fish select for coordinated collective motion in virtual prey. Science, 337, 1212-1215
Jakobsen, H. H. (2002). Escape of protists in predator-generated feeding currents. Aquatic Microbial Ecology, 26, 271-281.
Jeschke, J. M. & Tollrian, R. (2007). Prey swarming: Which predators become confused and why? Animal Behaviour, 74, 387-393.
Jones, K. A., Jackson, A. L. & Ruxton, G. D. (2011). Prey jitters: Protean behavior in grouped prey. Behavioral Ecology, 22, 831-836.
King, J. R. & Comer, C. M. (1996). Visually elicited turning behavior in Rana pipiens: Comparative organization and neural control of escape and prey capture. Journal of Comparative Physiology A, 178, 293-305.
Krakauer, D. C. (1995). Groups confuse predators by exploiting perceptual bottlenecks: A connectionist model of the confusion effect. Behavioural Ecology & Sociobiology, 36, 421-429.
Krause, J. & Ruxton, G. D. (2002). Living in Groups. Oxford: Oxford University Press.
Krylov, V. V., Nepomnyashchikh, V. A., Izvekov, E. I., Izyumov, Y. G. & Chebotareva, Y. V. (2008). Asymmetry of escape behavior of the roach (Rutilus rutilus, Cyprinidae): Correlation with morphological asymmetry. Zoologichesky Zhurnal, 87, 573-577.
Land, M. & Layne, J. (1995). The visual control of behavior in fiddler-crabs.2. Tracking control-systems in courtship and defense. Journal of Comparative Physiology A, 177, 91-103.
Landeau, L. & Terborgh, J. (1986). Oddity and the confusion effect in predation. Animal Behaviour, 34, 1372-1380.
Lazzari, C. & Varju, D. (1990). Visual lateral fixation and tracking in the hematophagous bug Triatoma infestans. Journal of Comparative Physiology A, 167, 527-531.
Marden, J. H. & Chai, P. (1991). Aerial predation and butterfly design: How palatability, mimicry, and the need for evasive flight constrain mass allocation. American Naturalist, 138, 15-36.
Martin, J. & Lopez, P. (1996). The escape response of juvenile Psammodromus algirus lizards. Journal of Comparative Psychology, 110, 187-192.
Oliva, D., Medan, V. & Tomsic, D. (2007). Escape behavior and neuronal responses to looming stimuli in the crab Chasmagnathus granulatus (Decapoda : Grapsidae). Journal of Experimental Biology, 210, 865-880.
Peters, R. H. (1983). The Ecological Implications of Body Size. Cambridge: Cambridge University Press.
Pewsey, A., Neuhauser, M. & Ruxton, G. D. (2013). Circular Statistics, in R. Oxford: Oxford University Press.
Preuss, T. & Faber, D. S. (2003). Central cellular mechanisms underlying temperature-dependent changes in the goldfish startle-escape behavior. Journal of Neuroscience, 23, 5617-5626.
Reluga, T. C. & Viscido, S. (2005). Simulated evolution of selfish herd behavior. Journal of Theoretical Biology, 234, 213-235.
Ruxton, G. D., Sherratt, T. N. & Speed, M. P. (2004). Avoiding Attack: The Evolutionary Ecology of Crypsis, Warning Signals & Mimicry. Oxford: Oxford University Press.
Ruxton, G. D., Jackson, A. L. & Tosh, C. R. (2007). Confusion of predators does not rely on specialist coordinated behavior. Behavioral Ecology, 18, 590-596.
Sherratt, T. N., Rashed, A. & Beatty, C. D. (2004). The evolution of locomotory behavior in profitable and unprofitable simulated prey. Oecologia, 138, 143-150.
Srygley, R. B. (1994). Locomotory mimicry in butterflies: The associations of positions of centers of mass among groups of mimetic unprofitable prey. Philosophical Transactions of the Royal Society of London B, 343, 145-155.
Srygley, R. B. & Dudley, R. (1993). Correlations of the position of centre of body-mass with butterfly escape tactics. Journal of Experimental Biology, 174, 155-166.
Stern, M., Ediger, V. L., Gibbon, C. R., Blagburn, J. M. & Bacon, J. P. (1997). Regeneration of cercal filiform hair sensory neurons in the first-instar cockroach restores escape behavior. Journal of Neurobiology, 33, 439-458.
Thake, M.A. (1981). Nonsense orientation: An adaptation for flocking during predation? Ibis, 123, 47-248.
Tauber, E. & Camhi, J. M. (1995). The wind-evoked escape behavior of the cricket Gryllus bimaculatus: Integration of behavioral elements. Journal of Experimental Biology, 198, 1895-1907.
Tosh. C. R., Jackson, A. L. & Ruxton, G. D. (2006). The confusion effect in predatory neural networks. American Naturalist, 167, E52-E65.
Turesson, H., Satta, A. & Domenici, P. (2009). Preparing for escape: anti-predator posture and fast-start performance in gobies. Journal of Experimental Biology, 212, 2925-2933.
Vallortigara, G. & Rogers, L. J. (2005). Survival with an asymmetrical brain: Advantages and disadvantages of cerebral lateralization. Behavioral Brain Science, 28, 575-633.
Vega-Redondo, F. & Hasson, O. (1993). A game-theoretic model of predator-prey signaling. Journal of Theoretical Biology, 162, 309-319.
Viscido, S. V., Miller, M. & Wethey, D. S. (2001). The response of a selfish herd under attack from outside the group perimeter. Journal of Theoretical Biology, 208, 315-328.
Viscido, S. V., Miller, M. & Wethey, D. S. (2002). The dilemma of the selfish herd: the search for a realistic movement rule. Journal of Theoretical Biology, 217, 183-194.
Walker, J. A., Ghalambor, C. K., Griset, O. L., McKenney, D. & Reznick, D. N. (2005). Do faster starts increase the probability of evading predators? Functional Ecology, 19, 808-815.
Von Christian, E. (1978). The jump of springtails. Naturwissenschaft, 65, 495-496.
Weihs, D. & Webb, P. W. (1984). Optimal avoidance and evasion tactics in predator-prey interactions. Journal of Theoretical Biology, 106, 189-206.
Wilson, A. M, Lowe, J. C., Roskilly, K. et al. (1013). Locomotion dynamics of hunting in wild cheetahs. Nature, 498, 185-189.
Woodbury, P. B. (1986). The geometry of predator avoidance by the blue-crab, Callinectes sapidus Rathbun. Animal Behaviour, 34, 28-37.
Yin, M. C. & Blaxter, J. H. S. (1987). Escape speeds of marine fish larvae during early development and starvation. Marine Biology, 96, 459-468.
Zani, P. A., Jones, T. D., Neuhaus, R. A. & Milgrom, J. E. (2009). Effect of refuge distance on escape behavior of side-blotched lizards (Uta stansburiana). Canadian Journal of Zoology-Revue Canadienne De Zoologie, 87, 407-414.